Hi, and welcome to this lesson! Today, we’re going to introduce some basic definitions related to graphs.
Basic definitions
Graph theory is probably one of the most common sub-fields of discrete mathematics. Graphs are mathematical structures that are used to represent the relationships between objects.
Mathematically, a graph is composed of a finite set of vertices, , and a set of edges, . We can therefore refer to a graph as a couple composed of and .
A graph is often depicted using circles for vertices and lines for edges.
Some examples: graphs can be used to represent relationships between family members in a family tree, in which case members would be represented as vertices and their relationships as edges…
Or, similarly, to represent molecule interactions in a biological organism…
Or, neural networks in the brain…
Hyperlinks between websites…
Or, simply, a maze, in which cells can be represented as vertices, and adjacent cells not separated by a wall can be linked with edges.
That’s right. There are multiple ways to define graphs. In the simplest case, edges convey information about which pairs of vertices are connected, and which are not. This means that becomes a set of pairs of vertices.
A pair is an unordered set that contains two distinct elements, and . Considering that they’re unordered, the pairs and are identical.
The order of a graph is the number of vertices it contains, which is 7 here in the example.
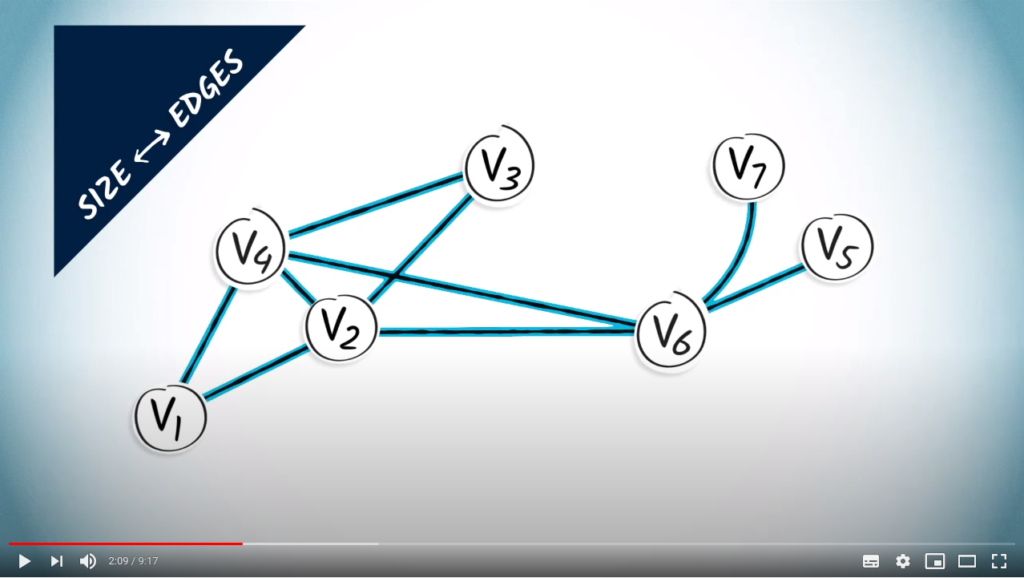
The size of the graph is the number of edges, which is 9 in this example.
As you can see, this is a simple, effective way to visualize a graph.
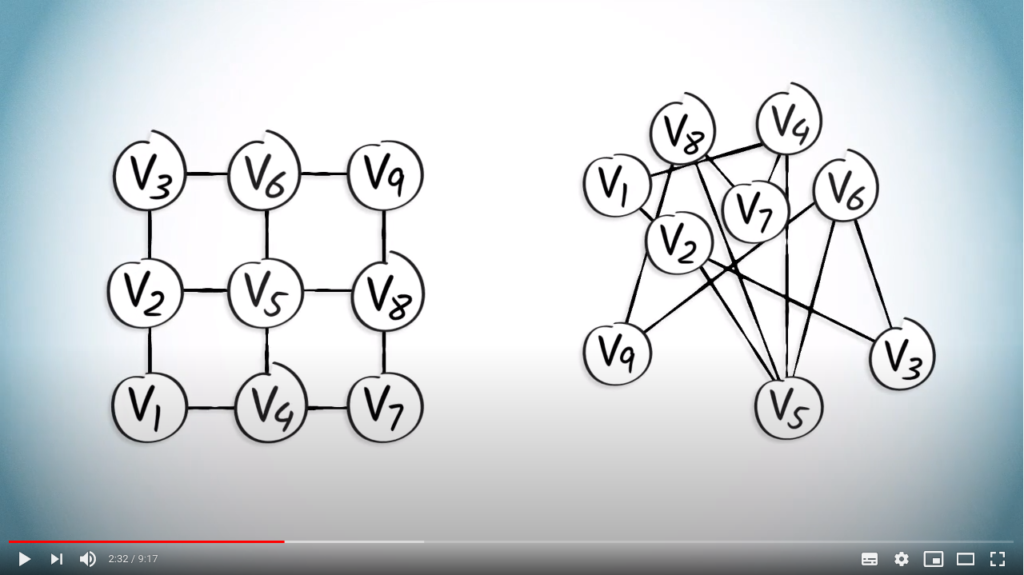
But it might also be misleading, because the creation of a figure like this requires you to make arbitrary decisions about the coordinates of vertices and the forms of lines.
This can be seen in the following example figure, which shows two graphs that appear to be different. However, these two graphs are identical in the sense that they have exactly the same set of vertices and the same set of edges.
Graphs were first introduced by Euler in 1736.
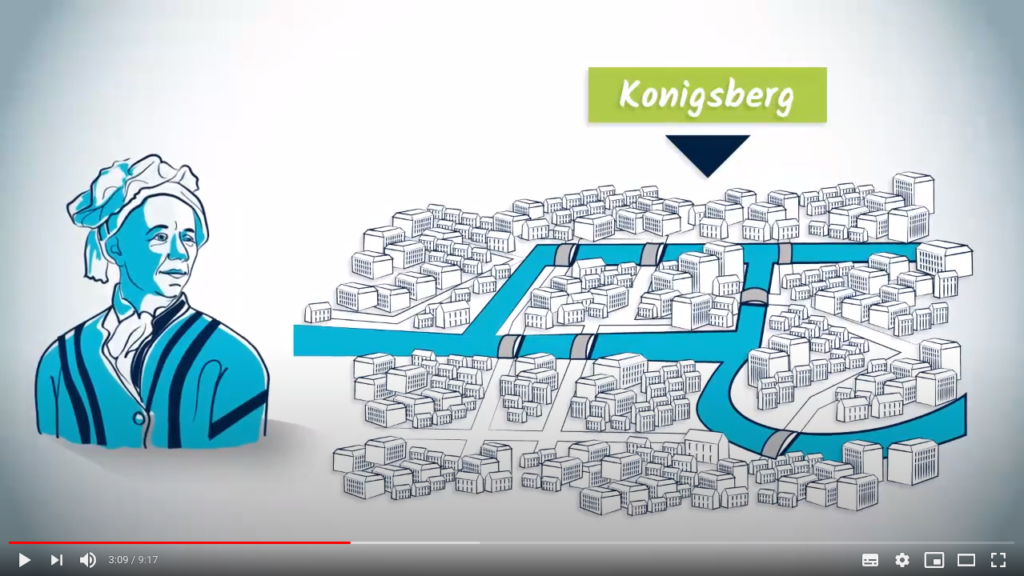
He was interested in formally proving that no one could walk around the city of Konigsberg and cross each of its bridges exactly one time. To prove this, he showed that starting and finishing at one point would require the graph to contain 0 or 2 land masses with an odd number of bridges. Since Konigsberg land masses all contained an odd number of bridges, this route was impossible.
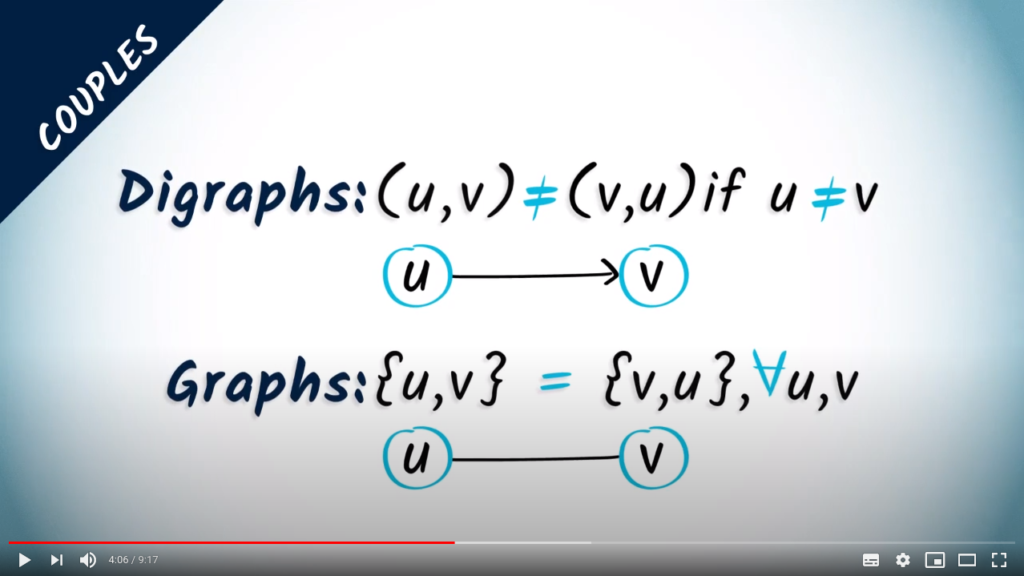
In some cases, edges can be directed, which means that a vertex can be connected to a vertex , even if is not connected to . In such cases, edges are made up of couples of vertices, such as, for example, .
Couples are more informative than pairs because the order of vertices in the couple is meaningful.
For example, the couple is distinct from the couple if and are distinct themselves, whereas the pair and the pair are identical. When using couples, graphs are known as digraphs. We will only consider graphs whose edges are pairs in this course, but it’s worth pointing out that the algorithms presented here do also apply to digraphs.
The adjacency matrix and weighted graphs
As in the previous examples, it’s preferable to index vertices from 1 to , which is the order of the graph. When vertices of the graph are indexed appropriately, an alternative way to represent a graph is to use a matrix.
The adjacency matrix of a graph is a matrix with as many rows and columns as the order of the graph. The adjacency matrix is built by putting a 1 at line and column if is an edge, and putting a 0 otherwise. Here’s an example of a graph and its corresponding adjacency matrix.
You should note that the adjacency matrix of a graph is always symmetric.
Adjacency matrices can be generalized to take values other than 0s and 1s, which allows weighted graphs to be defined.
Weighted graphs are particularly useful when edges represent distances or delays between vertices, because values in the adjacency matrix can be used to indicate the corresponding quantities.
To take an example, a weighted graph can model the distances between major cities in the US, and connection weights can be used to represent these distances. As well as distances, weights can be used to represent occurrences, proximities, relationships, and so on.
Paths and geodesic distances
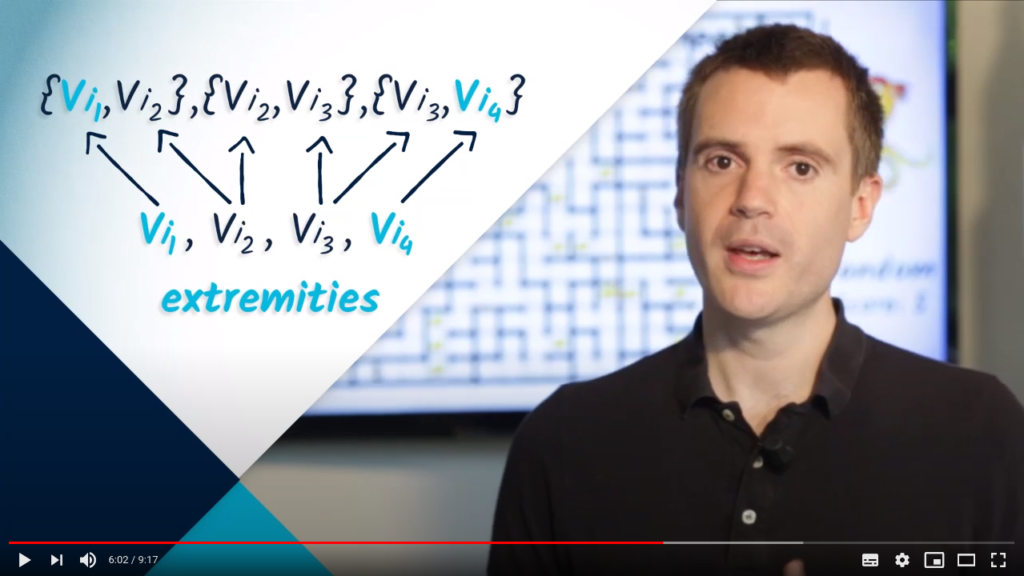
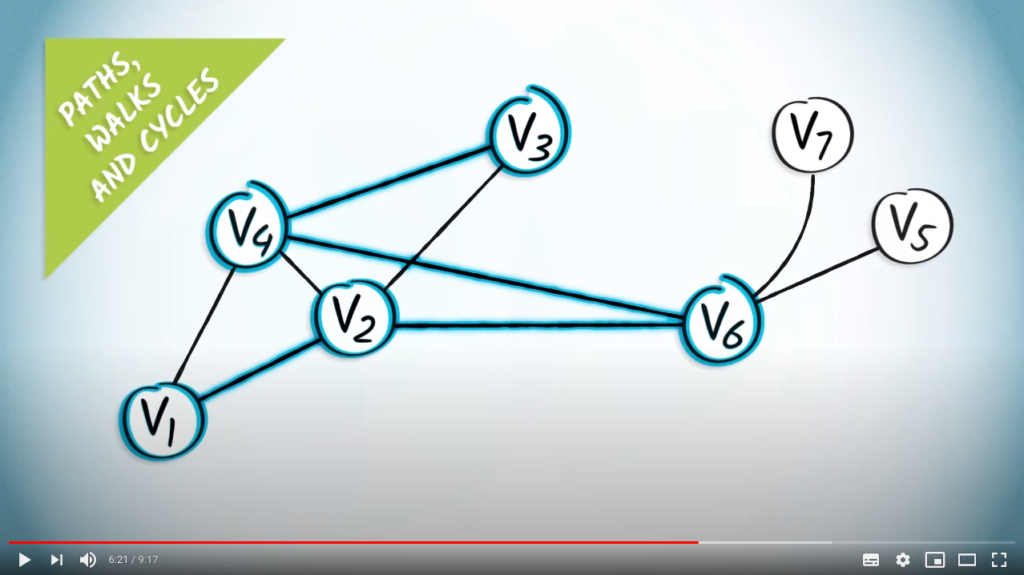
A path is an ordered sequence of edges that are distinct from one other, and is obtained from a sequence of vertices by joining any two consecutive vertices in the corresponding edge. The two extreme vertices of the sequence are called the extremities of the path.
Take a look at this graph. In this example, is a path, and we’ve obtained it from the vertex sequence .
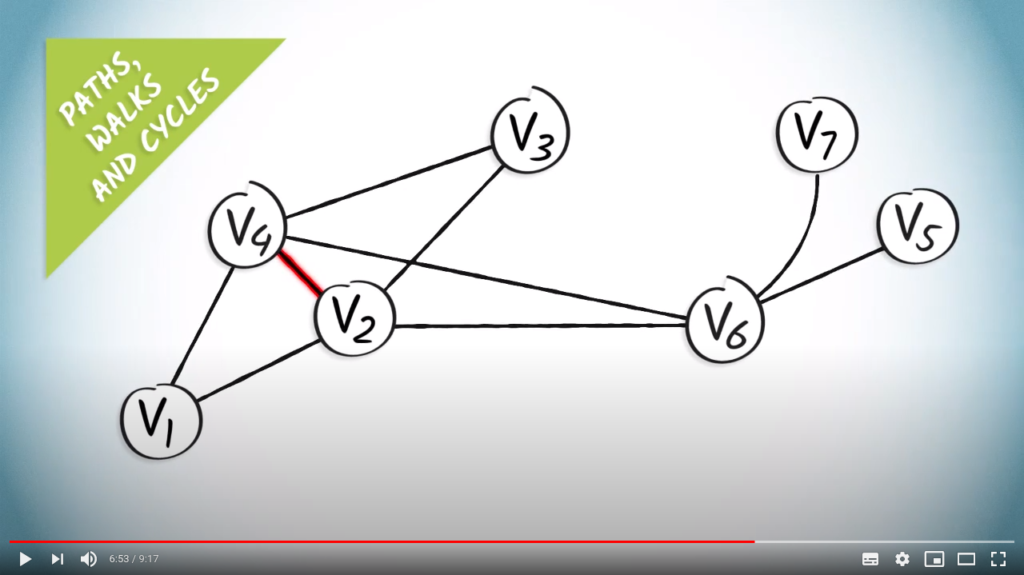
Paths are often confused with walks. A walk is a sequence of vertices, such that any two consecutive vertices form an edge in the graph. The difference is that, in a path, an edge cannot appear twice.
For example, in the previous graph is a walk, but the corresponding sequence is not a path, because of the repetition of the edge .
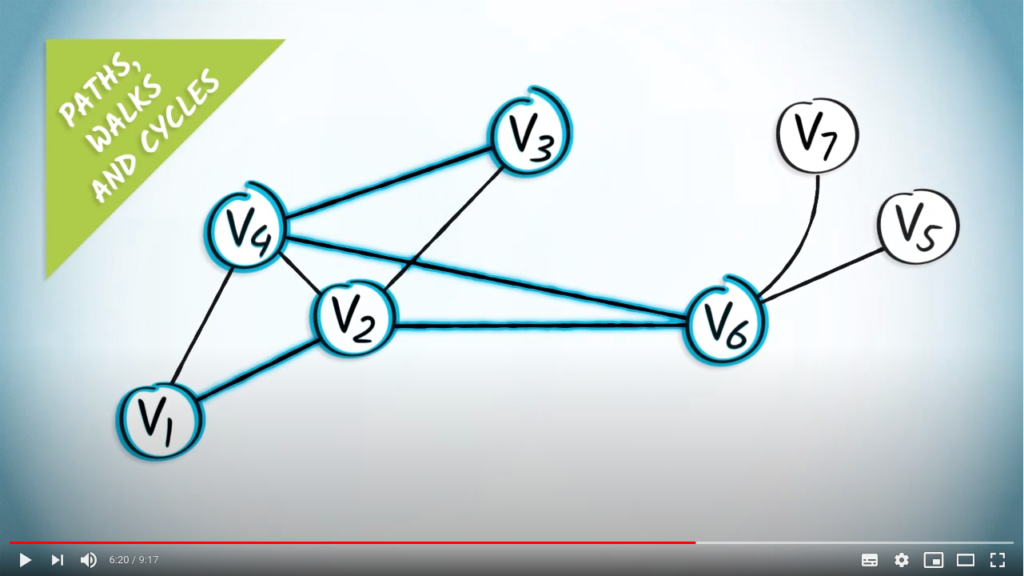
A cycle in a graph is a path in which the extremities are identical.
For example, in the previous graph is a cycle obtained from the sequence of vertices .
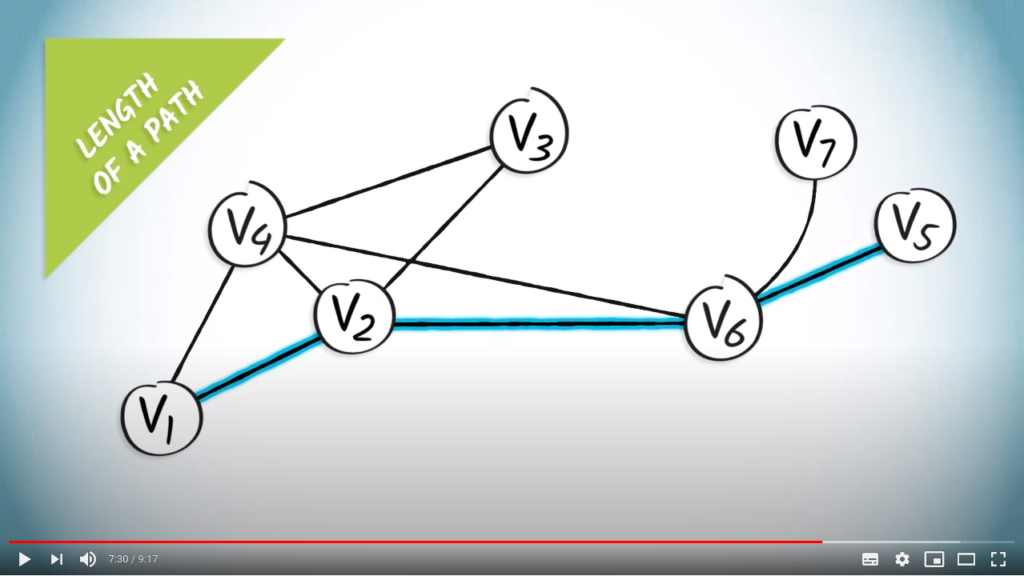
The length of a path is the length of the sequence of edges. For weighted graphs, the length corresponds to the sum of the weights.
If there exists at least one path linking two vertices and , there exists a shortest one. Most of the following lessons will be spent learning how to find the shortest paths between two vertices in a graph.
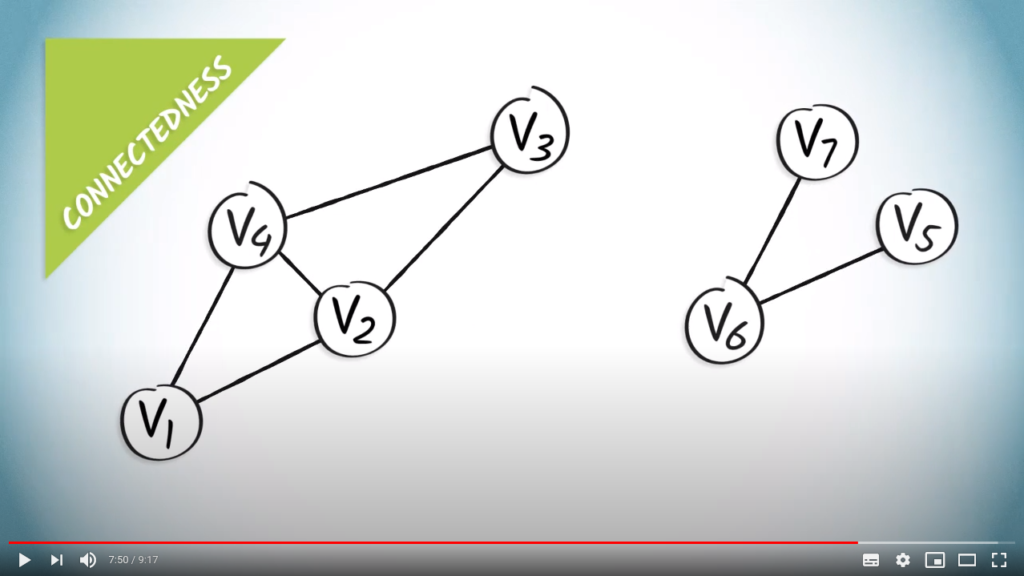
Finally, a graph is said to be connected if any two vertices there exists a path having these vertices as extremities.
All the example graphs we’ve considered so far are connected. Here’s one that’s not connected.
Standard graphs
Some graphs are very useful because they can appear in many situations.
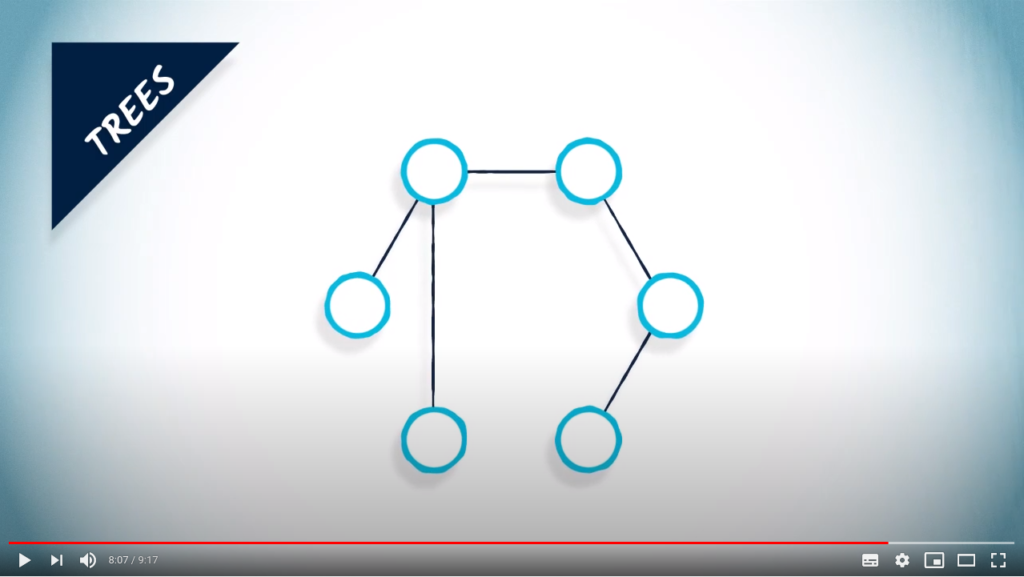
For example, we encounter trees all the time: in file systems, in genealogical graphs, in sport competitions where tournaments are often depicted as trees, and so on.
Trees are connected graphs that are cycle-free.
Note that trees are often confused with rooted trees, in which connected vertices have a specific relationship with one another. Rooted trees can be defined by choosing one arbitrary vertex to be the root of the tree.
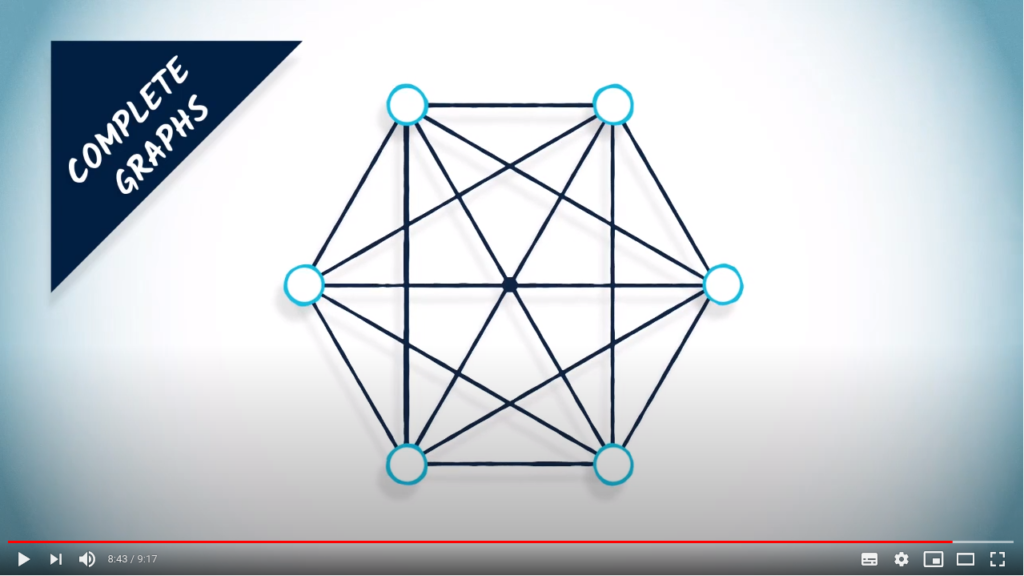
Another example of a standard graph is the complete graph. A complete graph includes all possible edges, and is often a good choice to test the abilities or the computation time of an algorithm that operates on graphs.
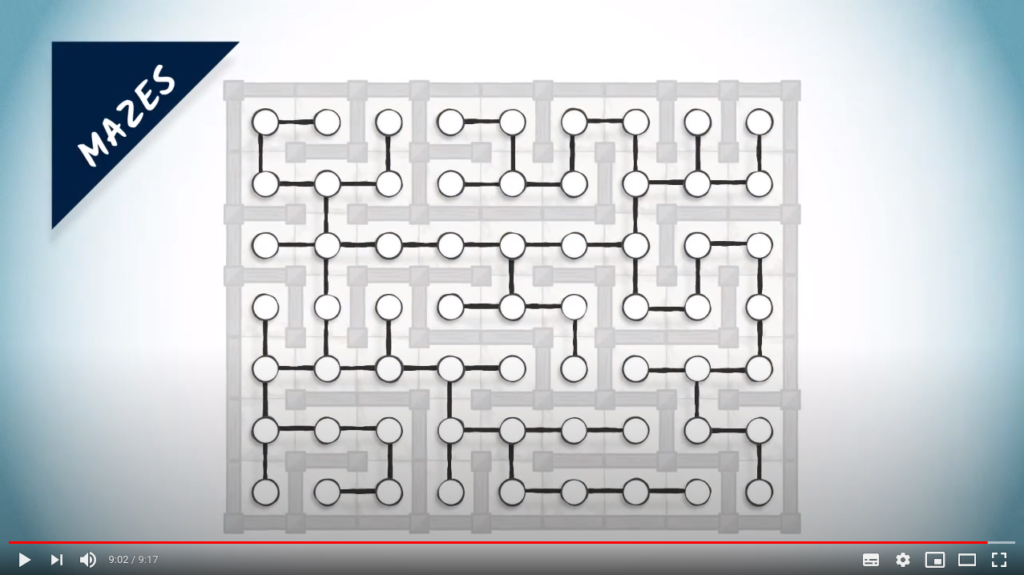
Mazes can also be represented as graphs. In this case, vertices can be used to represent the cells of the maze, and edges can be defined as neighboring cells that are not separated by a wall.
Concluding words
Thank you for your attention! I have really enjoyed talking about graph theory with you today.
Counting walks between two vertices
An interesting problem in graph theory is to count the number of possible walks of a fixed length between two chosen vertices.
For simplicity, consider a graph with no weights or directed edges. Its adjacency matrix therefore contains only 1s and 0s. The following result holds:
Theorem
Let denote the matrix power of a matrix , and let us note the entry of matrix which is at intersection of its row and its column.
The number of walks of length from vertex to vertex is equal to .
Proof
In order to prove this theorem, we proceed by induction, i.e., we are going to show two things :
That this is true under the initial conditions;
That if this is true for power (for any ), then it is true for power ).
1. Initial conditions
Case 1 – : The single walk of length 1 to go from to is to take edge .
Case 2 – : There cannot be any walk of length 1 as there is no direct edge between and .
2. Inductive step
For the purpose of induction, assume theorem is true for power .
A walk of length from to can be seen as a sequence of two walks:
A walk of length from to some vertex ;
A walk of length 1 from to .
As a consequence, the number of walks of length from to is equal to the sum of the number of walks of length from to , each multiplied by the number of ways to go from that to in one move. Mathematically, this is given by the following equation:
Since this is exactly the formulation of the dot-product used in matrix multiplications, this concludes that gives the number of walks from to .
A course on spectral graph theory: This probably won’t be useful for winning the challenge, but it shows the strong connection between graph theory and linear algebra.

 , and a set of edges,
, and a set of edges,  . We can therefore refer to a graph as a couple
. We can therefore refer to a graph as a couple  composed of
composed of 

 is an unordered set that contains two distinct elements,
is an unordered set that contains two distinct elements,  are identical.
are identical.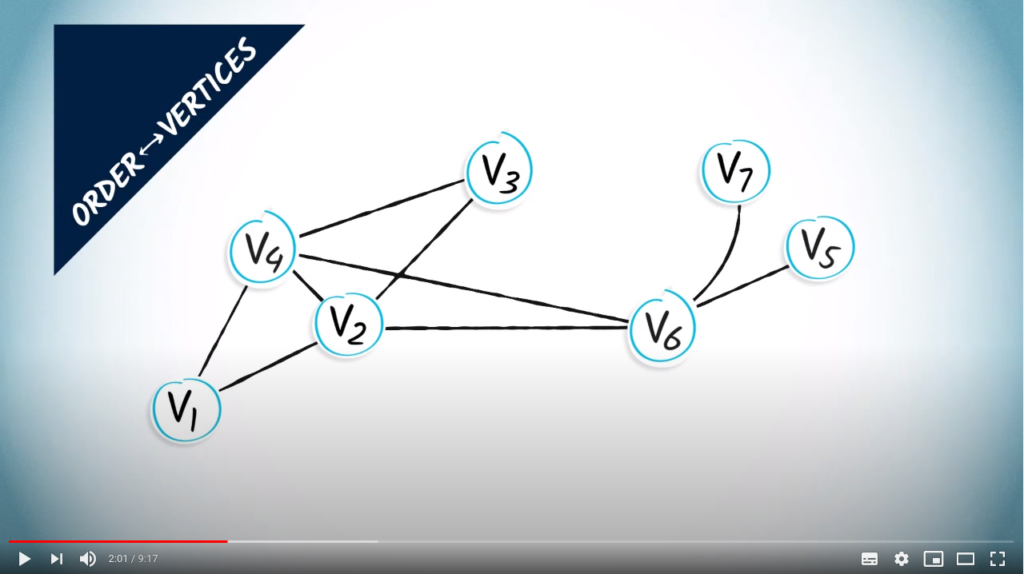
 .
.
 if
if 
 , which is the order of the graph. When vertices of the graph are indexed appropriately, an alternative way to represent a graph is to use a matrix.
, which is the order of the graph. When vertices of the graph are indexed appropriately, an alternative way to represent a graph is to use a matrix.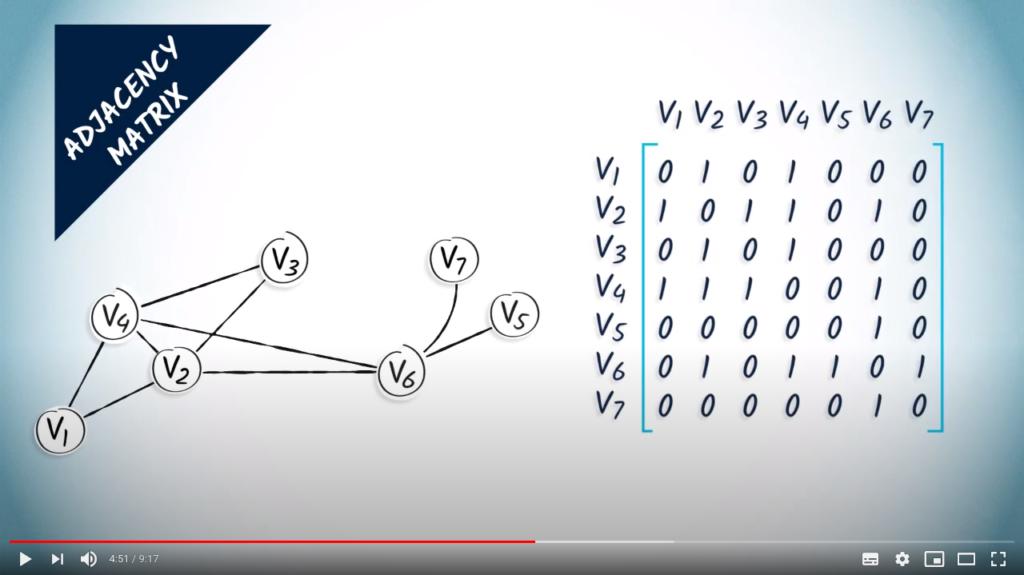
 if
if  is an edge, and putting a 0 otherwise. Here’s an example of a graph and its corresponding adjacency matrix.
is an edge, and putting a 0 otherwise. Here’s an example of a graph and its corresponding adjacency matrix.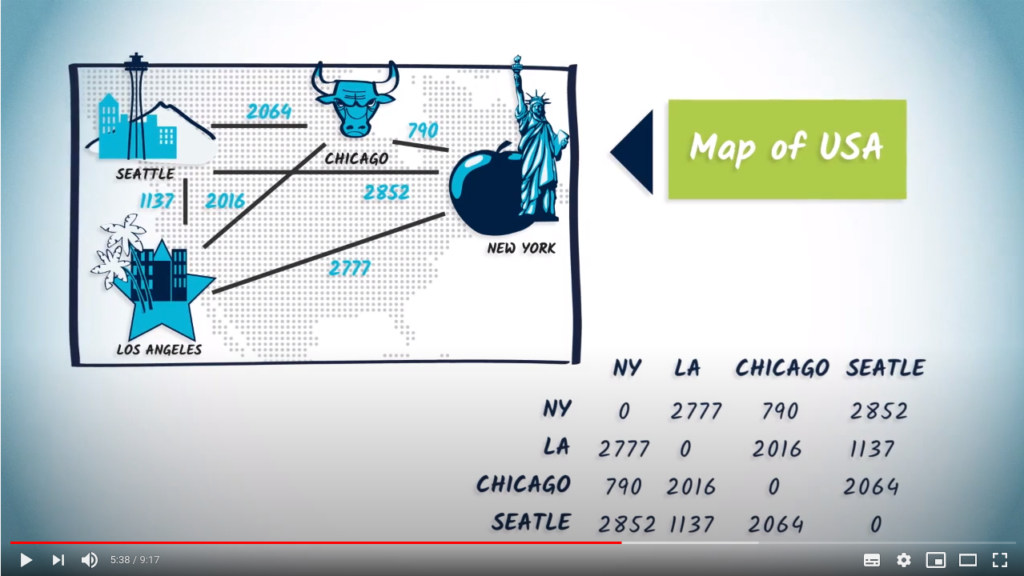
 is a path, and we’ve obtained it from the vertex sequence
is a path, and we’ve obtained it from the vertex sequence  .
.
 in the previous graph is a walk, but the corresponding sequence
in the previous graph is a walk, but the corresponding sequence  is not a path, because of the repetition of the edge
is not a path, because of the repetition of the edge  .
.
 is a cycle obtained from the sequence of vertices
is a cycle obtained from the sequence of vertices  .
.

 therefore contains only 1s and 0s. The following result holds:
therefore contains only 1s and 0s. The following result holds: denote the matrix power
denote the matrix power  of a matrix
of a matrix  , and let us note
, and let us note ![M[u, v]](https://formations.imt-atlantique.fr/pyrat/wp-content/ql-cache/quicklatex.com-8604c8d2096844e5553c3940b8474d2f_l3.png "Rendered by QuickLaTeX.com") the entry of matrix
the entry of matrix  row and its
row and its  column.
column. to vertex
to vertex  is equal to
is equal to ![A^k[u, v]](https://formations.imt-atlantique.fr/pyrat/wp-content/ql-cache/quicklatex.com-6134f0c4c4a760168b1e4abee560d7ca_l3.png "Rendered by QuickLaTeX.com") .
. (for any
(for any  ).
).![A[u, v] = A^1[u, v] = 1](https://formations.imt-atlantique.fr/pyrat/wp-content/ql-cache/quicklatex.com-0978fb31f6bbedffa9d15929ff894ede_l3.png "Rendered by QuickLaTeX.com") : The single walk of length 1 to go from
: The single walk of length 1 to go from  .
.![A[u, v] = A^1[u, v] = 0](https://formations.imt-atlantique.fr/pyrat/wp-content/ql-cache/quicklatex.com-151bf2621937d3b8e5b9d87a9457fe76_l3.png "Rendered by QuickLaTeX.com") : There cannot be any walk of length 1 as there is no direct edge between
: There cannot be any walk of length 1 as there is no direct edge between  from
from  ;
;![\[A^{k+1}[u, v] = \sum\limits_{w = 1}^n A^k[u, w] A[w, v]\]](https://formations.imt-atlantique.fr/pyrat/wp-content/ql-cache/quicklatex.com-cbee4da83028ed121055dd5ebd1572af_l3.png "Rendered by QuickLaTeX.com")
![A^{k+1}[u, v]](https://formations.imt-atlantique.fr/pyrat/wp-content/ql-cache/quicklatex.com-ef33a346be49114c5aee579c3781b9cc_l3.png "Rendered by QuickLaTeX.com") gives the number of walks from
gives the number of walks from